 English
English Русский
Русский Español
Español Français
Français Português
Portuguêsเกี่ยวกับเรา
- บริษัท
- ลูกค้า
- เทคนิคไฮไลท์
- ข้อดี
- ประวัติ บริษัท
- สิ่งอำนวยความสะดวกเป็นมิตรกับสิ่งแวดล้อม
- สิทธิบัตร
- ควบคุมคุณภาพ
- วิจัยและพัฒนา
- คู่มือการใช้งานพับสิ
- คำอธิบายสิพับเทคนิค
- สิพับการดำเนินงานรายละเอียด
- การบำรุงรักษาสิพับ
- สิพับการดำเนินงานหมายเหตุ
- คู่มือการใช้งาน Roadheader
- รายละเอียดทางเทคนิค Roadheader
- การบำรุงรักษา Roadeheader
- Roadheader หมายเหตุ
- วิธีการดำเนินงาน Roadheader
- คู่มือการใช้งานรับส่งรถเหมืองแร่
- การบำรุงรักษารถรับส่งรถเหมืองแร่
- รถรับส่งการดำเนินการเหมืองแร่รถ
- รายละเอียดการเหมืองแร่กระสวยเทคนิครถยนต์
- รถรับส่งหมายเหตุเหมืองแร่รถ
- การบำรุงรักษารถเข็นรถจักร
- คู่มือการบำรุงรักษาของจัมโบ้ขุดเจาะ
- ติดต่อเรา
รายละเอียดทางเทคนิค Roadheader
ระบบไฮโดรลิก
แนะนำสั้น ๆ : ทุกเครื่อง EBH45 roadheader aredriven โดยระบบไฮโดรลิคซึ่งมีการขับเคลื่อนโดยตรงจาก 75 กิโลวัตต์ motor.This มอเตอร์ไฟฟ้าโดยตรงสามารถขับรถสองรางตัวแปรปั๊ม:
(1) การกระจัดสองตัวแปรปั๊มแยก supplyoil สองวงจรไฮดรอลิน้ำมัน
(2) ปั๊มด้านหน้าเป็นปั๊ม displacementpiston โหลดการตรวจวัดตัวแปร มันจะควบคุมการเดินทางของเครื่องและการทำงาน ofcylinder ผ่านวาล์วนักบิน
(3) ปั๊มด้านหลังเป็นลูกสูบแทนที่ตัวแปร pumpthat ควบคุมการหมุนของหัวตัด
1. การทำงานของระบบไฮดรอลิ
ไฮดรอลิควบคุมระบบ:
(1) การเดินทางของเครื่อง roadheader
(2) การหมุนของหัวตัด
(3) การหมุนของล้อดาว
(4) การขับเคลื่อนกลไกการขนส่ง
(5) ด้านหน้าและด้านหลังขึ้นและลงรวมทั้งซ้ายและขวาการเคลื่อนไหวของหัวตัด
(6) มากและจากของแผ่นพลั่ว
(7) มากและจากของอุปกรณ์เสาหลัง
2. ปั้มน้ำมันและไฮดรอลิมอเตอร์
สถานีสูบน้ำคือการขับเคลื่อนด้วยมอเตอร์ไฟฟ้า 75kW ผ่านการรวมกันของปั้มน้ำมันแทนที่ตัวแปรและวาล์วนักบิน, ความดันจะถูกส่งแยกต่างหากเพื่อตัดขน, การขนส่งและการเดินทางกลไกเช่นเดียวกับไฮดรอลิมอเตอร์และถังน้ำมันของอุปกรณ์เสาหลัง roadheader มีเก้าถังทั้งหมด: 3 ถังที่ทำงานให้กับแขนตัด 2 กระบอกสูบยก 2 ถังตกปลาแขนตัดและ 2 กระบอกสูบ hoisting สำหรับอุปกรณ์เสาหลัง
3. คอนโซล
(1) คอนโซลติดตั้งด้วยไม้ปฏิบัติการมาตรวัดความดัน, วัดอุณหภูมิของน้ำมันและปรอทวัดอุณหภูมิน้ำ
(2) การเคลื่อนไหวของทุกถังน้ำมันและมอเตอร์ไฮดรอลิถูกควบคุมโดยการดำเนินงานไม้
(3) ความดันและอุณหภูมิของวงจรน้ำมันทั้งหมดสามารถตรวจพบโดยการวัดความดันและเครื่องวัดอุณหภูมิ
4. Load และวงจรการขนส่ง
(1) มอเตอร์ล้อดาว (โหลดและวงจรการขนส่ง) คือการขับเคลื่อนด้วยตัวแปรกระจัดปั๊มและมอเตอร์ไฮดรอลิของมันจะถูกควบคุมโดยน้ำมันจากปั๊ม (ปั๊มแรงดัน: 20MPa)
(2) มอเตอร์สายพานลำเลียงจะขับเคลื่อนด้วยพลังงานอย่างต่อเนื่องแทนที่ตัวแปรปั๊มและมอเตอร์ไฮดรอลิของมันจะถูกควบคุมโดยน้ำมันจากปั๊ม (ปั๊มแรงดัน: 25MPa)
(3) วาล์วการย้อนกลับของกลไกการโหลดและการขนส่งจะติดตั้งอยู่ภายใต้คอนโซล ตามเข็มนาฬิกาและทวนเข็มนาฬิกาหมุนของกลไกการโหลดและการขนส่งจะถูกควบคุมโดยติดปฏิบัติการ
5. การเดินทางวงจร
(1) วงจรการเดินทางคือการขับเคลื่อนด้วยปั๊มลูกสูบตัวแปรและทั้งสองของมอเตอร์ไฮดรอลิซึ่งแยกควบคุมด้านซ้ายและขวาในการเดินทางจะถูกควบคุมโดยแรงดันน้ำมันจากปั๊ม (ความดัน: 31.5MPa)
(2) วาล์วการย้อนกลับของมอเตอร์ไฮดรอลิถูกนำมารวมในนักบินมัลติวาล์วตีคู่
6. นำร่องวงจร
(1) การดำเนินงานทั้งหมดเครื่องจะถูกควบคุมโดยนักบินวาล์ว
(2) มี 13 วาล์วนำร่องดำเนินการรวมอยู่ใน
(3) ประกอบอุปทานน้ำมันนำร่อง ได้แก่ วาล์วแหล่งน้ำมันนักบินนักบินกรองและความปลอดภัยของนักบินวาล์ว
(4) ความดัน: 3.5MPa
7. ไฮดรอลิกระบอกวงจร
(1) วงจรกระบอกไฮโดรลิถูกขับเคลื่อนโดยภาระการตรวจวัดตัวแปรกระจัดปั๊ม
(2) น้ำมันจากปั๊มแยกควบคุมการหมุนสามถังน้ำมันแขนตัดถังน้ำมันของแผ่นพลั่วและเสากลับ
(3) การตั้งค่าความดันหมุนที่ 29.5MPa และความดันของถังน้ำมันที่ 27MPa
(4) การสนับสนุนวงจรไฮโดรลิคถูกออกแบบด้วยไฮดรอลิล็อค
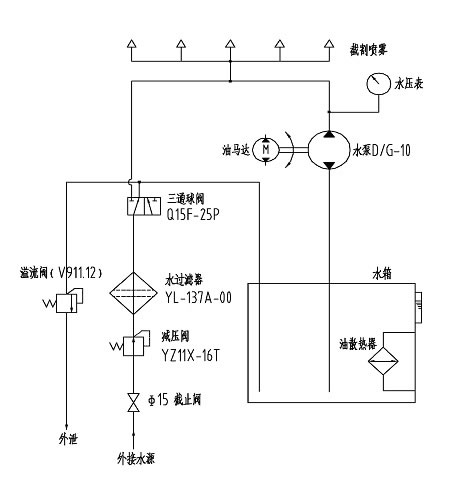
บีสเปรย์ระบบคูลลิ่ง
หลักการของระบบระบายความร้อนสเปรย์ที่มีดังต่อไปนี้:
แนะนำสั้น ๆ : ทุกเครื่อง EBH45 roadheader aredriven โดยระบบไฮโดรลิคซึ่งมีการขับเคลื่อนโดยตรงจาก 75 กิโลวัตต์ motor.This มอเตอร์ไฟฟ้าโดยตรงสามารถขับรถสองรางตัวแปรปั๊ม:
(1) การกระจัดสองตัวแปรปั๊มแยก supplyoil สองวงจรไฮดรอลิน้ำมัน
(2) ปั๊มด้านหน้าเป็นปั๊ม displacementpiston โหลดการตรวจวัดตัวแปร มันจะควบคุมการเดินทางของเครื่องและการทำงาน ofcylinder ผ่านวาล์วนักบิน
(3) ปั๊มด้านหลังเป็นลูกสูบแทนที่ตัวแปร pumpthat ควบคุมการหมุนของหัวตัด
1. การทำงานของระบบไฮดรอลิ
ไฮดรอลิควบคุมระบบ:
(1) การเดินทางของเครื่อง roadheader
(2) การหมุนของหัวตัด
(3) การหมุนของล้อดาว
(4) การขับเคลื่อนกลไกการขนส่ง
(5) ด้านหน้าและด้านหลังขึ้นและลงรวมทั้งซ้ายและขวาการเคลื่อนไหวของหัวตัด
(6) มากและจากของแผ่นพลั่ว
(7) มากและจากของอุปกรณ์เสาหลัง
2. ปั้มน้ำมันและไฮดรอลิมอเตอร์
สถานีสูบน้ำคือการขับเคลื่อนด้วยมอเตอร์ไฟฟ้า 75kW ผ่านการรวมกันของปั้มน้ำมันแทนที่ตัวแปรและวาล์วนักบิน, ความดันจะถูกส่งแยกต่างหากเพื่อตัดขน, การขนส่งและการเดินทางกลไกเช่นเดียวกับไฮดรอลิมอเตอร์และถังน้ำมันของอุปกรณ์เสาหลัง roadheader มีเก้าถังทั้งหมด: 3 ถังที่ทำงานให้กับแขนตัด 2 กระบอกสูบยก 2 ถังตกปลาแขนตัดและ 2 กระบอกสูบ hoisting สำหรับอุปกรณ์เสาหลัง
3. คอนโซล
(1) คอนโซลติดตั้งด้วยไม้ปฏิบัติการมาตรวัดความดัน, วัดอุณหภูมิของน้ำมันและปรอทวัดอุณหภูมิน้ำ
(2) การเคลื่อนไหวของทุกถังน้ำมันและมอเตอร์ไฮดรอลิถูกควบคุมโดยการดำเนินงานไม้
(3) ความดันและอุณหภูมิของวงจรน้ำมันทั้งหมดสามารถตรวจพบโดยการวัดความดันและเครื่องวัดอุณหภูมิ
4. Load และวงจรการขนส่ง
(1) มอเตอร์ล้อดาว (โหลดและวงจรการขนส่ง) คือการขับเคลื่อนด้วยตัวแปรกระจัดปั๊มและมอเตอร์ไฮดรอลิของมันจะถูกควบคุมโดยน้ำมันจากปั๊ม (ปั๊มแรงดัน: 20MPa)
(2) มอเตอร์สายพานลำเลียงจะขับเคลื่อนด้วยพลังงานอย่างต่อเนื่องแทนที่ตัวแปรปั๊มและมอเตอร์ไฮดรอลิของมันจะถูกควบคุมโดยน้ำมันจากปั๊ม (ปั๊มแรงดัน: 25MPa)
(3) วาล์วการย้อนกลับของกลไกการโหลดและการขนส่งจะติดตั้งอยู่ภายใต้คอนโซล ตามเข็มนาฬิกาและทวนเข็มนาฬิกาหมุนของกลไกการโหลดและการขนส่งจะถูกควบคุมโดยติดปฏิบัติการ
5. การเดินทางวงจร
(1) วงจรการเดินทางคือการขับเคลื่อนด้วยปั๊มลูกสูบตัวแปรและทั้งสองของมอเตอร์ไฮดรอลิซึ่งแยกควบคุมด้านซ้ายและขวาในการเดินทางจะถูกควบคุมโดยแรงดันน้ำมันจากปั๊ม (ความดัน: 31.5MPa)
(2) วาล์วการย้อนกลับของมอเตอร์ไฮดรอลิถูกนำมารวมในนักบินมัลติวาล์วตีคู่
6. นำร่องวงจร
(1) การดำเนินงานทั้งหมดเครื่องจะถูกควบคุมโดยนักบินวาล์ว
(2) มี 13 วาล์วนำร่องดำเนินการรวมอยู่ใน
(3) ประกอบอุปทานน้ำมันนำร่อง ได้แก่ วาล์วแหล่งน้ำมันนักบินนักบินกรองและความปลอดภัยของนักบินวาล์ว
(4) ความดัน: 3.5MPa
7. ไฮดรอลิกระบอกวงจร
(1) วงจรกระบอกไฮโดรลิถูกขับเคลื่อนโดยภาระการตรวจวัดตัวแปรกระจัดปั๊ม
(2) น้ำมันจากปั๊มแยกควบคุมการหมุนสามถังน้ำมันแขนตัดถังน้ำมันของแผ่นพลั่วและเสากลับ
(3) การตั้งค่าความดันหมุนที่ 29.5MPa และความดันของถังน้ำมันที่ 27MPa
(4) การสนับสนุนวงจรไฮโดรลิคถูกออกแบบด้วยไฮดรอลิล็อค
บีสเปรย์ระบบคูลลิ่ง
หลักการของระบบระบายความร้อนสเปรย์ที่มีดังต่อไปนี้:
สินค้าที่เกี่ยวข้อง





