 English
English Русский
Русский Español
Español Français
Français Português
PortuguêsTentang Kami
- Perusahaan
- pelanggan
- Highlights teknis
- Keuntungan
- sejarah perusahaan
- Fasilitas ramah lingkungan
- paten
- Kontrol kualitas
- R & D
- pengguna mucking Loader
- Mucking Loader Teknis Keterangan
- Mucking Loader Operasi Deskripsi
- Pemeliharaan mucking Loader
- Mucking Loader Operasi Catatan
- roadheader manual
- Roadheader Teknis Deskripsi
- Pemeliharaan Roadeheader
- roadheader Catatan
- Roadheader Metode Operasi
- Pedoman tambang Shuttle Car
- Pemeliharaan tambang Shuttle Car
- Tambang Operasi Mobil Shuttle
- Tambang Shuttle Car Teknis Keterangan
- Tambang Shuttle Car Catatan
- Pemeliharaan Trolley Lokomotif
- Pemeliharaan Manual Drilling Jumbo
- Hubungi kami
Roadheader Teknis Deskripsi
A. Sistem Hidrolik
Pengenalan singkat: Semua mesin EBH45 roadheader aredriven oleh sistem hidrolik, yang langsung didukung oleh 75 kW motor.This motor listrik dapat langsung mendorong dua variabel perpindahan pompa:
(1) Dua perpindahan variabel pompa secara terpisah supplyoil dua minyak sirkuit hidrolik.
(2) Pompa depan adalah variabel pompa displacementpiston beban-sensing. Ini mengontrol perjalanan dari mesin dan kerja ofcylinder melalui katup pilot.
(3) Pompa belakang adalah perpindahan piston variabel pumpthat mengontrol rotasi dari pemotongan kepala.
1. Fungsi Sistem Hidrolik
Hidrolik sistem kontrol:
(1) Traveling dari mesin roadheader.
(2) Rotasi dari pemotongan kepala.
(3) Rotasi roda bintang.
(4) Aktuasi dari mekanisme pengangkutan.
(5) depan dan belakang, atas dan bawah, serta gerakan kiri dan kanan dari pemotongan kepala.
(6) Ascending dan turun dari pelat sekop.
(7) Ascending dan turun dari perangkat prop kembali.
2. Minyak Pompa dan Hidrolik motor
Stasiun pompa digerakkan oleh 75kW bermotor listrik. Melalui kombinasi pompa minyak perpindahan variabel dan katup pilot, tekanan secara terpisah dikirim ke pemotongan, pemuatan, pengangkutan dan mekanisme bepergian serta hidrolik bermotor dan minyak silinder perangkat prop kembali. roadheader memiliki sembilan silinder total: 3 silinder yang bekerja untuk lengan pemotongan, 2 silinder mengangkat, 2 memancing silinder untuk lengan pemotongan dan 2 mengangkat silinder untuk perangkat prop kembali.
3. Konsol
(1) Konsol dipasang dengan tongkat operasi, pengukur tekanan, temperatur minyak gauge, dan termometer air.
(2) Pergerakan semua silinder minyak dan motor hidrolik dikendalikan dengan mengoperasikan tongkat.
(3) Tekanan dan suhu semua sirkuit minyak dapat dideteksi oleh alat pengukur tekanan dan termometer.
4. Load dan Circuit Transportasi
(1) Bintang motor roda (beban dan sirkuit transportasi) didorong oleh variabel pompa piston, dan motor hidrolik dikendalikan oleh minyak dari pompa (tekanan pompa: 20MPa).
(2) motor conveyor didorong oleh daya konstan pompa piston perpindahan variabel, dan motor hidrolik dikendalikan oleh minyak dari pompa (tekanan pompa: 25MPa).
(3) Katup membalikkan mekanisme beban dan transportasi dipasang di bawah konsol. Searah jarum jam dan berlawanan arah jarum jam rotasi mekanisme beban dan transportasi dikendalikan oleh tongkat operasi.
5. Perjalanan Circuit
(1) Rangkaian bepergian didorong oleh variabel pompa piston, dan kedua motor hidrolik yang terpisah mengontrol kiri dan perjalanan kanan dikendalikan oleh minyak tekanan dari pompa (tekanan: 31.5MPa).
(2) Katup membalikkan motor hidrolik terintegrasi pada pilot valve multi-tandem.
6. Circuit Percontohan
(1) Semua operasi mesin dikendalikan oleh katup percontohan.
(2) Ada 13 katup yang dioperasikan pilot total.
(3) Majelis pasokan minyak percontohan termasuk katup sumber minyak percontohan, saringan pilot dan katup pengaman percontohan.
(4) Tekanan: 3.5MPa.
7. Hydraulic Circuit Cylinder
(1) Rangkaian silinder hidrolik didorong oleh pompa piston perpindahan variabel beban-sensing.
(2) Minyak dari pompa secara terpisah mengontrol rotasi, tiga silinder minyak dari lengan pemotongan, silinder minyak pelat sekop dan kembali prop.
(3) Mengatur tekanan rotasi di 29.5MPa dan tekanan silinder minyak pada 27MPa.
(4) Dukungan sirkuit hidrolik dirancang dengan kunci hidrolik.
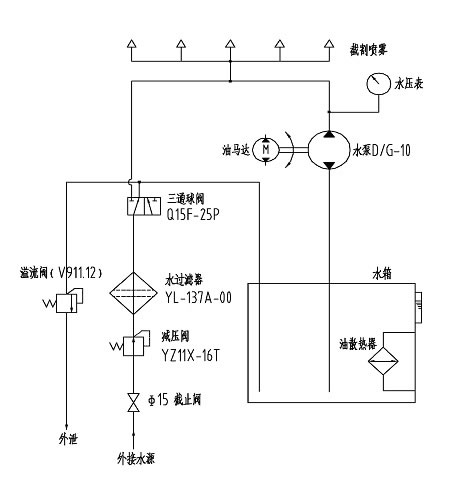
B. Sistem Semprot Cooling
Prinsip sistem pendingin semprot ditampilkan sebagai berikut:
Pengenalan singkat: Semua mesin EBH45 roadheader aredriven oleh sistem hidrolik, yang langsung didukung oleh 75 kW motor.This motor listrik dapat langsung mendorong dua variabel perpindahan pompa:
(1) Dua perpindahan variabel pompa secara terpisah supplyoil dua minyak sirkuit hidrolik.
(2) Pompa depan adalah variabel pompa displacementpiston beban-sensing. Ini mengontrol perjalanan dari mesin dan kerja ofcylinder melalui katup pilot.
(3) Pompa belakang adalah perpindahan piston variabel pumpthat mengontrol rotasi dari pemotongan kepala.
1. Fungsi Sistem Hidrolik
Hidrolik sistem kontrol:
(1) Traveling dari mesin roadheader.
(2) Rotasi dari pemotongan kepala.
(3) Rotasi roda bintang.
(4) Aktuasi dari mekanisme pengangkutan.
(5) depan dan belakang, atas dan bawah, serta gerakan kiri dan kanan dari pemotongan kepala.
(6) Ascending dan turun dari pelat sekop.
(7) Ascending dan turun dari perangkat prop kembali.
2. Minyak Pompa dan Hidrolik motor
Stasiun pompa digerakkan oleh 75kW bermotor listrik. Melalui kombinasi pompa minyak perpindahan variabel dan katup pilot, tekanan secara terpisah dikirim ke pemotongan, pemuatan, pengangkutan dan mekanisme bepergian serta hidrolik bermotor dan minyak silinder perangkat prop kembali. roadheader memiliki sembilan silinder total: 3 silinder yang bekerja untuk lengan pemotongan, 2 silinder mengangkat, 2 memancing silinder untuk lengan pemotongan dan 2 mengangkat silinder untuk perangkat prop kembali.
3. Konsol
(1) Konsol dipasang dengan tongkat operasi, pengukur tekanan, temperatur minyak gauge, dan termometer air.
(2) Pergerakan semua silinder minyak dan motor hidrolik dikendalikan dengan mengoperasikan tongkat.
(3) Tekanan dan suhu semua sirkuit minyak dapat dideteksi oleh alat pengukur tekanan dan termometer.
4. Load dan Circuit Transportasi
(1) Bintang motor roda (beban dan sirkuit transportasi) didorong oleh variabel pompa piston, dan motor hidrolik dikendalikan oleh minyak dari pompa (tekanan pompa: 20MPa).
(2) motor conveyor didorong oleh daya konstan pompa piston perpindahan variabel, dan motor hidrolik dikendalikan oleh minyak dari pompa (tekanan pompa: 25MPa).
(3) Katup membalikkan mekanisme beban dan transportasi dipasang di bawah konsol. Searah jarum jam dan berlawanan arah jarum jam rotasi mekanisme beban dan transportasi dikendalikan oleh tongkat operasi.
5. Perjalanan Circuit
(1) Rangkaian bepergian didorong oleh variabel pompa piston, dan kedua motor hidrolik yang terpisah mengontrol kiri dan perjalanan kanan dikendalikan oleh minyak tekanan dari pompa (tekanan: 31.5MPa).
(2) Katup membalikkan motor hidrolik terintegrasi pada pilot valve multi-tandem.
6. Circuit Percontohan
(1) Semua operasi mesin dikendalikan oleh katup percontohan.
(2) Ada 13 katup yang dioperasikan pilot total.
(3) Majelis pasokan minyak percontohan termasuk katup sumber minyak percontohan, saringan pilot dan katup pengaman percontohan.
(4) Tekanan: 3.5MPa.
7. Hydraulic Circuit Cylinder
(1) Rangkaian silinder hidrolik didorong oleh pompa piston perpindahan variabel beban-sensing.
(2) Minyak dari pompa secara terpisah mengontrol rotasi, tiga silinder minyak dari lengan pemotongan, silinder minyak pelat sekop dan kembali prop.
(3) Mengatur tekanan rotasi di 29.5MPa dan tekanan silinder minyak pada 27MPa.
(4) Dukungan sirkuit hidrolik dirancang dengan kunci hidrolik.
B. Sistem Semprot Cooling
Prinsip sistem pendingin semprot ditampilkan sebagai berikut:
Produk-produk terkait





